hardingfv32 wrote: ↑16 Jul 2017, 01:09
So back to your statement: I would think the as the car drives 'towards' the sensor that the signal strength would go from zero to peak fallowing a tradition parabolic signal strength/distance curve. Can you explain why you feel it would go horizontal? There might be something for me to learn.
I'll take another shot at getting some info out about this question (an excellent question BTW, please excuse my answers being to the point not because of sarcasm or temper, but due to the amount of time it takes to type this in between breaks). BTW, I stand by Salo and Whiting as to the tolerances being adhered to regarding Bottas.
Refresher-
-No loops in the boxes (see below)
-Onboard telemetry (think g/motion sensor), the camera's are useful, as shown to the public.
-There is more than one high-res/high speed broadview camera (why do you think there would be one to see the whole field??)
-The start system uses a timestamp which (careful...the word GPS shows up here) uses GPS.
Why GPS? The GPS system utilizes significant complex mathematical formulas to calculate synchronous orbits...all to do one thing: Give correct positioning information. The by product of this is accurate timing. TIMING, not location. Virtually of all of race operations equipment utilizes this timestamp. When GPS is referenced when relative to timing, it's the GPS timestamp, not what people think of using a Garmin...
the location data available for non-military use isn't accurate enough for motorsports.
(If you haven't read my post on how timing works, you may find it interesting:
viewtopic.php?f=1&t=9114&p=704403#p703625
OK, so let's look at the timing loop/Tx Signal information. (Buckle up, this is going to be a long and boring post to address how the system works, and I will let you draw your own conclusions as to what it's usefulness would be for various applications other than passings logging.)
Imagine a fixed loop in the track (pick your poison...pit lane, data point, sector loop, S/F, or even for the sake of this discussion, the start box (grrrrrr)).
The loop is a receiver of a digital signal transmitted by the onboard Tx. It is at a fixed point on the ground, embedded in a cut and caulked channel in the track surface able to sustain high speed traffic. See the images previously posted of the S/F line.
Let's look at a normal passing on track first-
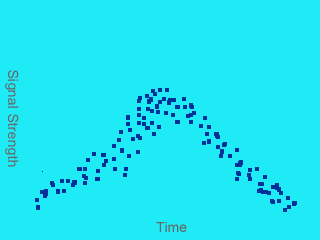
If a competitor is traveling over the loop in race direction, the signal of the Tx will start out as a weak hit (one data point on a graph at the lowest signal, arriving at a specific timestamp...I have scoured my Mac for a picture of this, but cannot find any I've my fingertips on...maybe at some future point I can post the exact system picture to ease your minds.
As the Tx moves towards the loop, the signal strength (SS) increases and another data point, another hit is registered (this actually takes place in milliseconds, so it's actually "hits"). As the Tx closes on the loop, the graph would continue upward as discussed.
Until the Tx is in such a position that it reaches its maximum SS in relationship to the loop. The timestamp of that hit is compared with all other hits from that specific TX and it is logged as the actual passing. As the Tx passes over and travels beyond the loop in race direction, the signal begins to degrade, and each hit (timestamp) begins being marked on the downward slope of the graph in relation to time.
Here's a representation:
Now let's look at what happens when a car is
parked/stopped/resting over the same loop (this happens in the pit lane and on track as a matter of racing).
The car approaches the loop, the SS slowly increases. As the car sits, the loop receives maximum hits (the TX transmits it's digital signal constantly, so the hits are many, and the SS of each can vary due to normal issues with any receiver. Again, the system is designed to "listen" for digital signal on the Fq of the TX's and by default, hears anything on that Fq and timestamps it relative to the Tx's specific serial number.
So while the Tx is sending signal, the system has a setting to show Max signal and low signal (this is set for the system, the loop,
not by Tx. Squelch is also set by the loop and decoder,
not by Tx. But let's just say that you could distinguish the peak signal. A car coming to rest near a loop would have a SS if it maintains it's location. As it progressed to the loop, the signal strength would increase if it moved forward. As it traveled forward, the SS would be represented in a series of lines in upward plateaus. If the car were to back away form the loop, the SS would decline, and the timestamps on the graph
would look as if the car had travel over the loop and beyond it, as above. There would be no way to determine direction in this way, only SS over time. Cars rarely pass over a loop on track and back up once they hit the center of the loop (the max SS) at speed...this would be pretty rough on the gear box...
A resting car in a pit box scenario or sitting on a loop looks like this:
There is no way to determine the cars direction relative to the loop, although this method could be used to determine it's
proximity to the loop.
The problem is each cars Tx has a different and varying SS, and the loops ability to pick up the signal also generates anomalies and outliers, and this is where the timestamps get irrelevant. So a car standing still could and often will have an increased SS which generates a hit and time stamp, which would show as a movement even though the car was standing still.
IF utilizing the Tx relative to a cut loop in the track to sense a start box false start, it would ultimately only be useful to show the car moving over the loop...inch by inch movement would be difficult to prove. Given this, the video evidence and telemetry ("sensor system") connected to the track timing network (track sensors) is a more reliable way to determine if a competitor has broken the rules.
In any event, they are allowed to react, or in some cases pre-judge the lights out and launch. They suffer a penalty when this movement is deemed to have occurred outside the acceptable norm of movement from the car for other reasons.