
The valve will only close itself based on steering input (and then stay closed until pressure in the inner wheel circuit drops back down below the pressure of the outer wheel circuit when it closed. I don’t think that kind of system could be used in a repeatable way. You are line locking the outside wheel at an arbitrary pressure that depends on the amount of pressure that was applied before the driver steered into the corner. If he then lets off of the brake, both sides are open again and there is no differential. There would have to be some very precise and repetitive braking and steering patterns to use something as described above.
The way I think the system that he draws would actually work is for a driver to complete most of the braking in a straight line when the valve is open to both left and right rear calipers. Then the electronics would move the brake balance rearwards automatically as the driver releases the pedal (brake migration is allowed) at which point the driver has started to turn in and one of the valves needs to be closed. Either the inside rear brake is dragged passively, or it is done with the pedal input from the driver. The correct side that needs to be closed depends on how such a system would be implemented.
This is assuming what Scarbs has drawn is the actual implementation of an F1 team.
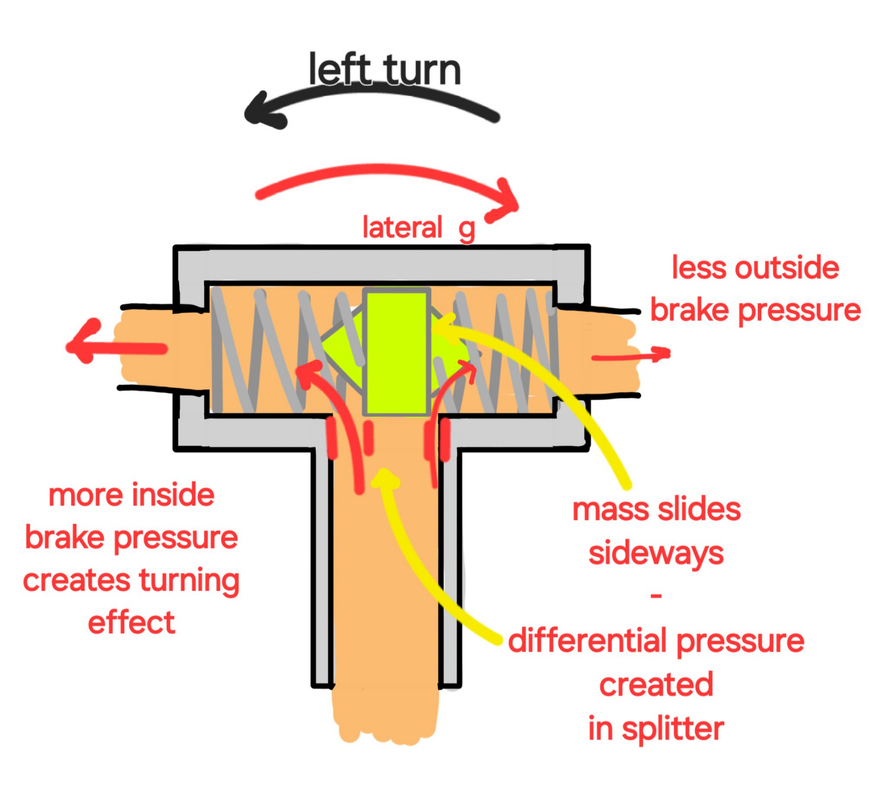
It’s worth remembering that Scarbs is a journalist turned technical analyst so I’m not surprised that he drew something that doesn’t make sense in engineering terms. He has done it before.






